






L’autoriparatore sa bene quanto il turbocompressore sia sempre di più un componente “high-tech” in un moderno propulsore e quanto sia sempre più raffinata la sua gestione da parte dell’elettronica del motore; per questa ragione abbiamo deciso di trattare un breve approfondimento sugli attuatori di comando impiegati nei turbo a geometria variabile (VNT – Variable Nozzle Turbine) spesso causa di malfunzionamenti del motore e del turbocompressore.
Per incrementare in maniera sostanziale il valore di potenza massima e di coppia di un motore occorre aumentare il rendimento volumetrico: l’impiego del turbocompressore è una delle soluzioni più efficaci e collaudate, una scelta praticamente “obbligata” da parte dei progettisti per aumentare le performance soprattutto dei motori diesel di ultima generazione.
I turbocompressori hanno infatti lo scopo di immettere elevate quantità di aria (o meglio: di ossigeno) nella fase di aspirazione del motore; ciò permette un maggiore apporto di carburante in camera di combustione con l’effetto di un aumento significativo dei valori di potenza e di coppia del motore.
Il turbocompressore è definito molto spesso e impropriamente “turbina”; in realtà esso si compone di due parti distinte: la turbina (azionata dal flusso dei gas di scarico) e il compressore (che provvede a comprimere l’aria aspirata e a inviarla al motore). La girante della turbina e la girante del compressore sono elementi meccanicamente collegati con un medesimo asse (il così detto alberino): è quindi corretto affermare che questi tre elementi (che insieme formano il rotore del turbocompressore) assumeranno medesime velocità di rotazione angolare.
Il rotore è messo in rotazione dal flusso dei gas di scarico del motore: è ovvio che la sua velocità di rotazione angolare è fortemente dipendente dalla quantità di gas di scarico, ma anche da tutta una serie di caratteristiche costruttive che ne determinano la sua inerzia (che deve essere la più bassa possibile).
Per portare rapidamente ad alta velocità di rotazione la girante della turbina (e quindi tutto il rotore del turbo) occorrerà che i gas di scarico siano dotati di una sufficiente energia. Ne consegue che il mancato raggiungimento di questa soglia di energia (necessaria a produrre lavoro positivo del compressore) determina un certo tempo di ritardo di funzionamento del turbocompressore, meglio noto con il termine di “turbo lag”.
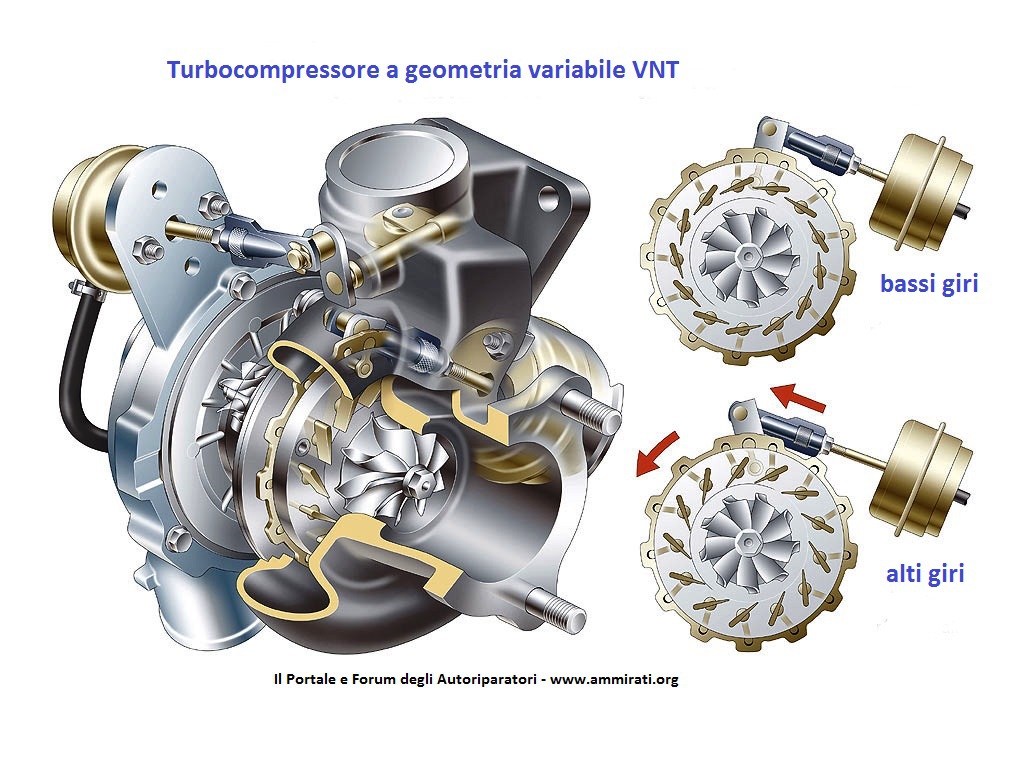
Per ovviare al ritardo di risposta del turbocompressore è stata decisiva l’introduzione all’interno del carter turbina della cosiddetta “geometria variabile”, in grado di adattarsi al differente flusso dei gas di scarico durante il funzionamento del motore permettendo bassi valori di turbo-lag e una azione molto efficace per tutto l’arco di giri di rotazione del motore.
La geometria variabile dei turbocompressori è composta da “palette mobili”, poste intorno alla ruota della turbina. Le palette hanno la funzione di variare la sezione dei canali delimitati dalle palette stesse e l’angolo di incidenza dei gas di scarico che mettono in rotazione la ruota della turbina.
In concreto, la posizione delle palette della geometria determina (e varia) la velocità del rotore del turbocompressore.
Un altro modo efficace che permette un ridotto turbo lag e ottime prestazione è rappresentato da soluzioni molto raffinate e complesse che si basano sull’impiego di più turbocompressori – di dimensioni e caratteristiche diverse – posti in serie o in parallelo in grado di coniugare al meglio le caratteristiche di risposta di turbocompressori di dimensioni piccole con quelli di maggiore dimensione.
Vantaggi della geometria variabile
Sicuramente il più grande vantaggio è stato ridurre il turbo lag (ovvero il fastidioso ritardo di risposta), che ha migliorato la linearità di funzionamento del motore sovralimentato rispetto – ad esempio – a quanto si poteva riscontrare con i primi motori diesel turbocompressi.
Il ritardo di risposta è derivante dal fatto che il motore a bassi regimi offre un flusso limitato di gas di scarico che non permette alla turbina a geometria fissa (non a geometria variabile) di trasferire una sufficiente rotazione al rotore e quindi non permette al compressore del turbo di dare al motore pressioni di sovralimentazioni utili per un concreto aumento dei valori di coppia e di potenza.
Con l’impiego di turbocompressori a geometria variabile viene invece garantita una elevata velocità di rotazione angolare del compressore -sin dai bassi giri di funzionamento del motore - in quanto le “palette mobili” attuano una restrizione della sezione dei canali in cui fluiscono i gas di scarico, che sono così posti nella direzione più favorevole (incidenza della geometria) rispetto alle palette della girante della turbina.
I gas di scarico acquistano dunque velocità e fanno aumentare significatamene di giri il rotore del turbocompressore, che, conseguentemente, garantirà una maggiore compressione dell’aria al motore. Ciò a sua volta permetterà di erogare più potenza, anche ai bassi regimi, in quanto sarà maggiore la quantità di carburante che il sistema di alimentazione potrà fornire al propulsore in conseguenza dell’aumentata compressione dell’aria e, quindi, della maggiore quantità di ossigeno immesso nei cilindri.
In questo modo si innesca un circolo virtuoso: si avrà più velocità dei gas di scarico che produrrà una velocità maggiore del rotore della turbina e il compressore invierà aria più compressa e quindi più ossigeno al motore.
Con i vecchi turbocompressori non a geometria variabile si otteneva invece una situazione opposta, non proprio “virtuosa”: una grossa massa di gas di scarico in ingresso alla turbina produceva elevate contropressioni allo scarico con l’effetto che la maggiore difficoltà di espulsione di quest’ultimi provocava un aumento considerevole della temperatura dei gas di scarico e una effettiva riduzione del rendimento del motore (rapporto pressione di sovralimentazione/prestazioni).
Questo effetto negativo, nel caso di turbocompressori a geometria variabile, è molto limitato: infatti, all’aumentare dei giri del motore (e quindi del flusso dei gas di scarico), l’incidenza delle palette mobili varia. La sezione di passaggio dei gas di scarico aumenta con l’effetto sia di “modulare” la velocità di rotazione della turbina (e quindi evitare il “fuori giri” della stessa) sia per permettere un più efficace deflusso dei gas di scarico che garantisce bassi valori di contropressione nel collettore di scarico.
I vantaggi così ottenuti sono molteplici: ridotto consumo di carburante e aumento del rendimento del motore lungo tutto l’arco di regime di funzionamento.
Per ottenere i vantaggi elencati è importante che la regolazione della geometria variabile sia molto precisa: in caso contrario il funzionamento del motore sarebbe non regolare e potrebbe provocare una rottura precoce del turbocompressore che opererebbe in condizioni di over-speed.
È quindi determinante che l’elettronica di gestione del motore monitori con efficacia la posizione assunta dalla geometria variabile.
I sistemi sono sostanzialmente due.
Il primo è il controllo (di plausibilità) effettuato attraverso la verifica della pressione effettiva nel collettore di aspirazione rispetto al comando che la centralina impartisce all’attuatore di comando della geometria variabile.
Il secondo è un feed-back diretto della reale posizione meccanica assunta dalle palette della geometria variabile (tipicamente attraverso un encoder elettronico contenuto nel sistema elettro-meccanico di comando della stessa).
Non di minore importanza è la registrazione meccanica dell’asta/attuatore di comando della geometria.
Il comando della geometria variabile
La geometria variabile viene comandata da un attuatore.
Gli attuatori, si dividono sostanzialmente in tre tipologie principali: attuatori pneumatici; attuatori elettro-pneumatici (sono attuatori pneumatici che hanno un sensore elettronico che comunica alla centralina se l’attuatore si sta muovendo correttamente); attuatori elettronici.
Attuatori pneumatici
I turbocompressori a geometria variabile non hanno più la valvola wastegate o valvola by-pass, perché la velocità del rotore e la pressione di sovralimentazione vengono regolate dalla geometria variabile. La posizione delle palette è controllata da un attuatore.
L’attuatore pneumatico ha il compito di effettuare la regolazione dell’incidenza delle palette della geometria variabile (e quindi della pressione di sovralimentazione) attraverso un’asta di comando che collega lo stesso con la geometria variabile. Di vitale importanza è effettuare la regolazione meccanica dell’attuatore (nella maggior parte dei casi funziona a depressione con valori di circa - 0.6 bar).
Con asta di comando totalmente retratta abbiamo la pressione di sovralimentazione massima, mentre con asta di comando estesa abbiamo la pressione di sovralimentazione minima.
L’ attuatore pneumatico può funzionare sia in pressione, per mezzo di un tubo che collega il carter compressore all’ attuatore, che in depressione: in tal caso l’attuatore è azionato dalla depressione fornita da una elettrovalvola (o convertitore di pressione) denominata EPDW e comandata in PWM.
L’elettrovalvola EPDW collega l’attuatore pneumatico con la sorgente di vuoto per mezzo di tubi flessibili: a seconda dello stato di comando in PWM operato dalla ECU motore si avrà un vuoto variabile che agisce sull’attuatore pneumatico determinando –in concreto- la sua corsa fisica di azionamento della geometria variabile. L’asta di comando varia la sua corsa a secondo della posizione richiesta dalla centralina motore per ottenere un determinato valore di sovrappressione.
L’elettrovalvola è attivata da un segnale a onda quadra (PWM) con impulso di larghezza variabile (duty cycle) e frequenza fissa. Utilizzando un generatore di segnali in PWM è possibile verificare il corretto funzionamento della valvola EPDW in modo rapido ed efficiente per individuare malfunzionamenti anche complessi a carico dell’impianto di sovralimentazione, come ad esempio, l’isteresi magnetica dell’elettrovalvola EPDW che genera diversi DTC di errore in centralina motore.
Attuatori elettropneumatici
Meritano una trattazione a parte gli attuatori elettropneumatici; come noto sono quelli dotati di un sensore di posizione della propria asta di comando e quindi “sentono” la posizione delle palette della geometria variabile che controllano.
Il sensore può essere integrato nella capsula dell’attuatore pneumatico del turbocompressore, oppure, non meno frequentemente, esso è smontabile e sostituibile (come nel caso dei turbocompressori montati sui motori Ford, Peugeot, Citröen 2000 cc., ecc.).
Il sensore di posizione rileva la corsa meccanica del diaframma dell’attuatore pneumatico collegato all’asta suddetta e fornisce una tensione proporzionale alla posizione assunta dallo stesso (in un range da 0 a 5 Volt) alla centralina motore che provvederà a regolare opportunamente la pressione di sovralimentazione rispetto a quanto programmato (“mappato”) in memoria. Ogni attuatore elettropneumatico per il corretto funzionamento deve lavorare in un range predefinito di tensione rispetto alla corsa meccanica assunta: è possibile rilevare questi parametri utilizzando specifici tester dedicati.
Attuatori elettronici
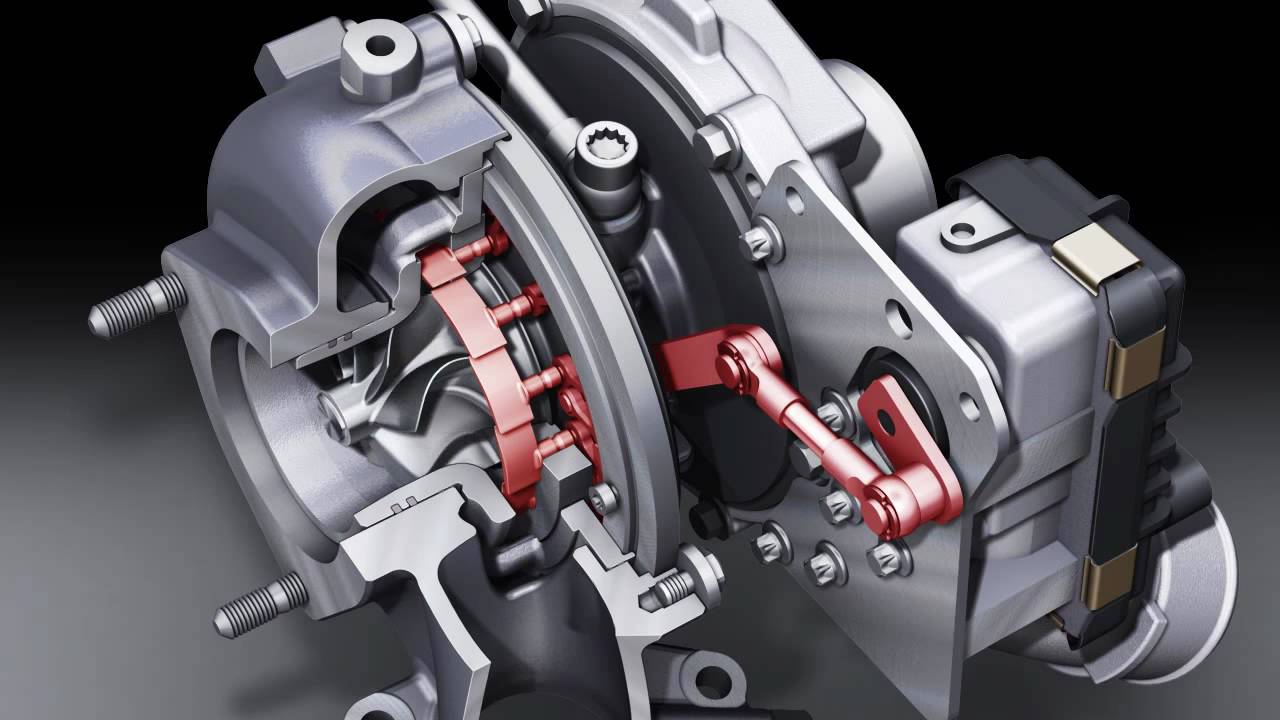
Nel corso degli ultimi anni le più importanti case costruttrici di turbocompressori hanno apportato importanti innovazioni tecnologiche; una di queste è rappresentata dall’evoluzione del comando della geometria variabile. Dai collaudati sistemi pneumatici si è passati al comando mediante attuatori elettronici direttamente installati sul corpo del turbocompressore.
Gli attuatori elettronici, sono composti da: una parte elettronica che ha il compito di dialogare con la centralina del motore; una parte meccanica che attua i comandi che la centralina ha comunicato alla scheda elettronica dell’attuatore.
La parte meccanica è composta da un motore in corrente continua (DC), una vite senza fine e da una cremagliera (o ruota dentata) completa di sensore di posizione (encoder) e da un braccio di rinvio.
La scheda elettronica dell’attuatore trasmette impulsi al motore DC; quest’ultimo ha il compito di spostare il braccio di rinvio dell’attuatore in modo tale da comandare la geometria variabile del turbo, collegata al braccio, attraverso un’asta di comando.
Ciascun attuatore è realizzato specificamente per il turbocompressore per cui è progettato e la combinazione di elettronica e meccanica in esso contenuta è specifica per il veicolo su cui è montato il turbo: rappresentano -in sostanza- una combinazione unica.
L’attuatore elettronico è stato creato come una unità da fornire sempre insieme al turbo: nel recente passato la rottura dell’attuatore imponeva la sostituzione integrale del turbocompressore.
Ovviamente è indispensabile una corretta diagnosi del malfunzionamento che porti a diagnosticare la reale causa: quanti di noi si sono ritrovati -almeno una volta- sintomi quali mancanza di potenza, scarsa resa a bassi regimi del motore accompagnati da errori in centralina motore quali “scostamento pressione di sovralimentazione” oppure “controllo turbo“ o “corto circuito / circuito aperto durante l’attivazione dell’attuatore”? Tutto questo potrebbe essere derivante da anomalie riscontrabili sull’attuatore elettronico.
L’attuatore può presentare due tipologie di malfunzionamento: di natura elettronica o di natura meccanica.
In caso di anomalie di natura elettronica occorre effettuare in primis un accurato controllo del connettore dell’attuatore, verificando che sia presente la tensione di alimentazione e che i contatti siano integri.
Difficile rilevare guasti al microprocessore della scheda elettronica dell’attuatore. Meno complesso (basta a volte un controllo visivo) dei ponti di alimentazione sul circuito. Non difficile anche rilevare un guasto del motorino dell’attuatore che generalmente potrebbe essere interrotto oppure, quando alimentato, essere bloccato o girare in maniera non corretta (il braccio dell’attuatore non effettua alcuno spostamento).
A tal riguardo controllare accuratamente che la geometria variabile scorra liberamente e non presenti alcun punto di attrito o, comunque, scarsa fluidità di movimento.
La condizione di buon funzionamento dell’attuatore quindi non deve essere valutata solo sulla base del movimento o della corsa visiva che riusciamo a scorgere sul veicolo, in quanto spesso questo ci trae in inganno. Attraverso un’accurata ispezione e con l’ausilio di strumenti come i tester per la prova degli attuatori elettronici, possiamo riscontrare consumi anomali della vite senza fine presente all’interno dell’attuatore elettronico o addirittura la rottura della stessa vite senza fine o della cremagliera (o ruota dentata).
Photogallery
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)